Textbook
on
"Intelligent
Systems and Technologies in Rehabilitation Engineering"
The material on this page is aimed to briefly present and complement
the textbook:
Intelligent Systems and Technologies
in Rehabilitation Engineering,
Horia-Nicolai Teodorescu, Lakhmi C. Jain
(Eds.), CRC Press, 2001
The textbook has been adopted as a textbook in several universities
around the world, and teachers using the text in the class have asked for
additional material.
Notice: If some of the linked
files would not show on your screen when you click on the link, please use
the right-hand button of your mouse to click on the link, then click on: "Save
link as..." command to download the file on your computer.
Book included in the Engineering
Handbooks on Line series. See at CRC Press, EngNetBase (Engineering
Handbooks on Line) the profiles of the book and editors by clicking here.
Also, the volume has been
Main sections of the book (Contents): 1. Introduction;
2. Sensorial Prostheses; 3. Locomotor Prostheses; 4. Pacemakers and Life-sustaining
Devices; 5. Robotic Systems and Advanced Mechanics

Remarks
on using this volume as a textbook
This volume is suitable for a textbook on prostheses, as taught
in Bio-Medical Engineering undergraduate and graduate classes.
The textbook may be adapted to the need of the class and to
the available time for lecturing. For a typical one semester class, the teacher
may wish to skip some chapters, taking into account the main interest in his
or her department. Taking into account the Contents of the volume, and on
the profile of the course given, the teacher may chose one of the strategies:
Course emphasizing locomotor prostheses
INTRODUCTION: Ch. 1 New Technologies in Rehabilitation. General Trends
LOCOMOTOR PROSTHESES: Ch. 4. Sensory Feedback for Lower Limb Prostheses;
Ch. 5. Multifunction Control of Prostheses using the Myoelectric Signal;
Ch. 6. Selective Activation of the Nervous System for Motor System Neural
Prostheses; Ch. 7. Upper Limb Myoelectric Prostheses: Sensory Control System
and Automatic Tuning of Parameters
ROBOTIC SYSTEMS AND ADVANCED MECHANICS: Ch. 11. Service Robots for Rehabilitation
and Assistance; Ch. 12. Computerized Obstacle Avoidance Systems for the
Blind and Visually Impaired; Ch. 13. Advanced Design Concepts for a Knee-Ankle-Foot
Orthosis
Course emphasizing sensorial prostheses and sensors
INTRODUCTION Ch. 1. New Technologies in Rehabilitation. General Trends
SENSORIAL PROSTHESES: Ch. 2. A Retinal Prosthesis to Benefit the Visually
Impaired. Ch. 3. Intelligent Techniques in Hearing Rehabilitation
LOCOMOTOR PROSTHESES: Ch. 4. Sensory Feedback for Lower Limb Prostheses;
Ch. 5. Multifunction Control of Prostheses using the Myoelectric Signal;
Ch. 6. Selective Activation of the Nervous System for Motor System Neural
Prostheses Ch. 7. Upper Limb Myoelectric Prostheses: Sensory Control System
and Automatic Tuning of Parameters
PACEMAKERS AND LIFE-SUSTAINING DEVICES: Ch. 8. Computer-Aided Support Technology
for Artificial Heart Control Diagnosis and Hemodynamic Measurements; Ch.
9. Diaphragm Pacing for Chronic Respiratory Insufficiency; Ch. 10. Intelligent
Systems in Heart Pacemakers
ROBOTIC SYSTEMS AND ADVANCED MECHANICS: Ch. 11. Service Robots for Rehabilitation
and Assistance; Ch. 12. Computerized Obstacle Avoidance Systems for the
Blind and Visually Impaired; Ch. 13. Advanced Design Concepts for a Knee-Ankle-Foot
Orthosis
Notice. We found useful that, during the first class,
a presentation of the main terminology and abbreviations is made. This presentation
may be a little bit tiring, but it may save much time in the subsequent classes,
and may eliminate a "language barrier" in the understanding by the
students of the subsequent lectures. The Index of acronyms and abbreviations,
and the Index of terms, complementing the volume, may help in preparing the
presentation.
Additional
material
A package of additional material is available free of
charge, and other materials can be purchased (see also the related volumes
below and links to Amazon.com). Please ask
here for the . The package includes:
If you are an eligible teacher using the textbook in your class,
you will receive a package tailored to your needs. Please write
to the editors and describe your needs, including the description of the
background of your students. Click here
to see a sample of transparency.
Additional readings
The volumes listed below may be found useful to complement the
textbook, especially for Ph.D. level classes and seminars:
- Soft Computing Techniques in Human-Related Sciences Horia-Nicolai
L. Teodorescu, Abraham Kandel, Lakhmi C. Jain. 1999, Hardcover, 1st ed., 416
pp. ISBN: 0849316359 Publisher: CRC Press, LLC.
We specifically recommend as further readings the chapters: Fuzzy
Control Methodology: Basics and State of the Art, by Toshio Fukuda
and Nfaoyuki; Learning Eye-Arm Coordination Using Neural and Fuzzy
Neural Techniques, by Adrian Stoica; Learning Stiffness Characteristics
of the Human Hand Using a Neuro-Fuzzy System, by Alexander Iliesh
and Abraham Kandel; Fuzzy Reduction Control of Acceleration and Vibration
of a Stretcher-Cart on an Ambulance, by Mikio Maeda and Shuta Murakami
Link to this
volume at Amazon.com. Link to this
volume at Barnes and Noble.com
- Fuzzy and Neuro-Fuzzy Systems in Medicine (International Series on
Computational Intelligence) by Horia-Nicolai Teodorescu (Editor), Abraham
Kandel (Editor), Lakhmi C. Jain. Hardcover - 352 pages (October 1998).
-
This volume presents several applications of fuzzy and neuro-fuzzy systems
in medicine. We specifically recommend as further readings the chapters:
Ch. 1 Fuzzy Logic and Neuro-Fuzzy Systems in Medicine and Biomedical
Engineering. A Historical Perspective; Ch. 11. Fuzzy Control and
Decision Making in Drug Delivery; Ch. 12 Neuro-Fuzzy Hardware in
Medical Applications 12. A System Requirements for Fuzzy and Neuro-Fuzzy
Hardware in Medical Equipment; 12. B Neural Networks and Fuzzy-Based
Integrated Circuit and System Solutions Applied to the Biomedical Field
Link to this
book at Amazon.com. Link to this
volume at Barnes and Noble.com.
This volume has been featured as one of "the
100 most popular books in Medicine"
at YBOOKS. See
here the nomination. (Notice: If the some of
the linked files would not show on your screen when you click on the link,
please use the right-hand button of your mouse to click on the link, then
click on: "Save link as..." command to download
the file on your computer.)
Also, the volume is featured in the list of "key
references" at Omega.com. See
here the list.
-
Hardware Implementation of Intelligent Systems by
Horia-Nicolai Teodorescu, Lakhmi C. Jain, Abraham Kandel (Editors). Hardcover.
282 pages 1st edition (July 15, 2001)
Link to this
book at Amazon.com. Link to this
volume at Barnes and Noble.com
This volume presents several hardware implementations
for fuzzy systems, neural networks, and genetic algorithms, that may exemplify
the use of these technologies in prostheses too. We specifically recommend
as further readings the chapters: Ch. 3. Hardware implementation of
intelligent systems; Ch. 4. High performance fuzzy processors;
Ch. 5. A digital fuzzy processor for fuzzy-rule-based systems;
Ch. 7. Analog VLSI hardware implementation of a supervised learning
algorithm; Ch. 2. High-performance hardware design and implementation
of genetic algorithms.
Links
to pages describing some of the additional material used in our classes
and in projects
- [1] A sensor used to detect position of the limbs and other parts of the
body in applications for limb tremor measurements, Virtual Reality
applications, sleep monitoring, infants monitoring etc. Click
here
to see the Patent description at US Patent Office, or here
to see the description at the European Patent Office. A second patent has
been obtained for the application of infant monitoring. Click here
to see the second Patent description in US Patent Office, or here
to see the description at the European Patent Office.
- [2] A nonlinear dynamic sensor used, among others, to build an artificial
retina, which is closer in modeling the processes in the natural retina,
is described in a recent patent application. Click here
to see the description at the European Patent Office. Click here
to see the Figures 1, 2,3 in this patent.
Sample
Projects and Homework
1. Use the sensor concept presented in references [1] (see above) to
build a device that may be used by a disabled person to monitor the tremor.
(Notice: the sensor is covered by several international and national patents,
and can not be used in actual application without the written permission of
the patent rights owners.)
Download here Figure 2 in the patent.
Download here Figures 3 and 4 in the
patent. Download here Figures 5 and 6 in
the patent.
 (a, b)
(a, b)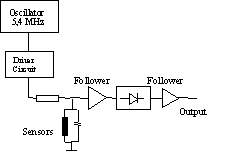 (c)
(c)
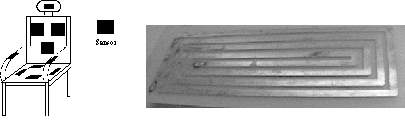
(a) Positions of the sensors on the chair, for tremor, movement and respiration
measurements
(b) Configuration and shape of an embodiment of the sensor
(c) Block diagram of the sensor circuit
 (d)
(d) 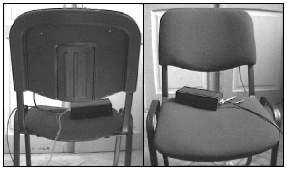 (e)
(e)
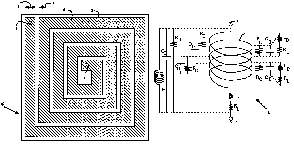
(d) Schematics of the sensor and equivalent circuit of the sensor. (e) A chair
with the sensor included in the back support. The box seen on the chair includes
the driving and measuring circuitry and is not visible to the user of the chair,
in general.
(Notice: the sensor is covered by several international
and national patents, and can not be used in actual applications without
the written permission of the patent rights owners.)
2. Use the sensor concept presented in references [1] (see above) to
build a device that may be used by a disabled person to control, by using the
position of his / her head, the direction and velocity of a wheelchair. The
control should be without contact and the rules for the control are:
i) head moved to left, wheelchair directed to left, while left hand is pushing
a button.
ii) head moved to right, wheelchair directed to right, while left hand is pushing
a button.
iii) head moved to backward, wheelchair stopped, while left hand is pushing
a button.
iv) head moved to forward, wheelchair accelerates, while left hand is pushing
a button.
Fuzzy logic is recommended for implementing the rules. Means to remove noisy
movements (like tremor) should be included in the system.
(Notice: the sensor is covered by several international
and national patents, and can not be used in actual applications without
the written permission of the patent rights owners.)
3. Read the paper at this link.
Read also a brief outline of the project here --
see section 3.3. in the article. (If the linked file would not
show on your screen when you click on the link, please use the right-hand button
of your mouse to click on the link, then click on: "Save link as..."
command to download the file on your computer.) Then, imagine a system
that predicts the tremor movement of the arm and applies an electric stimulus
to the arm muscles that stabilizes the hand movement and position. Example:
specifically design the system for the use of Parkinsonian subjects.
Recent
essential references on sensorial mechanisms
The references below may prove excellent starting points in homework and
projects related to sensorial prostheses.
How the olfactory system makes sense of scents, by Stuart Firestein Nature,
Vol. 413, September 2001 www.nature.com
Molecular basis of mechanosensory transduction, by Peter G. Gillespie & Richard
G. Walker Nature, Vol. 413, 13 September 2001 www.nature.com
Visual transduction in Drosophila, by Roger C. Hardie and Padinja Raghu Nature
413, 186-193 (2001)
How the olfactory system makes sense of scents, by Stuart Firestein Nature
413, 211-218 (2001)
Molecular basis of mechanosensory transduction, by Peter G. Gillespie and Richard
G. Walker Nature 413, 194-202 (2001)
Molecular mechanisms of nociception , by David Julius and Allan I. Basbaum
Nature 413, 203-210 (2001)
Stochastic sensory inspired by biology, by Hagan Bayley and Paul S. Cremer
Nature 413, 226-230 (2001)
Receptors and transduction in taste, by Bernd Lindemann Nature, Vol. 413, 13
September 2001
Odor-introduced membrane currents in vertebrate-olfactory receptor neurons
, by S. Firestein & F. Werblin. Science 244: 79-82 (1989)
Useful
links in the field of Rehabilitation Engineering:
http://www.census.gov/population/pop-profile/p23-189.pdf
(Population Profile of the United State 1995. Current Population Reports)
www.fernuni-hagen.de/FTB/aaate/position.htm
(Empowering older and disabled people in the EU)
http://www.resna.org/wwwrsour_web.html
( REHABILITATION ENGINEERING AND ASSISTIVE TECHNOLOGY SOCIETY OF NORTH AMERICA)
http://www.iinet.net.au/~sharono/arata/index.html
(Australian Rehabilitation & Assistive Technology Association)
http://www.vicnet.net.au/disability/
(Australian Disability Information)
www.simfer.it/ (The Italian
Society of Physical Medicine and Rehabilitation - Societa Italiana di Medicina
Fisica e Reabilitazione)
http://www.ama-assn.org/insight/gen_hlth/glossary/glos_nq.htm
(Medical Glossary on AMA - American Medical Association)
http://www.graylab.ac.uk/omd/
(On-Line Medical Dictionary)
http://www.medicinenet.com
http://www.bath.ac.uk/Centres/BIME/icorr97.htm
(Int. Conf. Rehab. Robotics ICORR'97)
http://www.nlm.nih.gov/
(US National Library of Medicine)
http://www.ncbi.nlm.nih.gov/pubmed/
(PUBMED at National Library of Medicine, USA)
http://www.bath.ac.uk/Centres/BIME/proceed.htm
(Int. Conf. Rehab. Robotics ICORR'97)
http://ep.espacenet.com/
([Espacenet] of the European Patent Office)
Further
issues and possible future issues in rehabilitation technology
One of the issues not yet discussed in rehabilitation technology framework,
but discussed in the domain of cognition, is the cognitive and emotional rehabilitation.
The issue is still in the emerging stage, and its advent, while pioneered by
a few scientists, including our research during the last 20 years, has not developed
into a clear-cut domain.
To get a glimpse on the current state in the domain, a good reading might be:
 |
WHAT SHOULD BE COMPUTED TO UNDERSTAND AND MODEL BRAIN FUNCTION? From
Robotics, Soft Computing, Biology and Neuroscience to CognitivePhilosophy.
Fuzzy Logic Systems Institute (FLSI) Soft Computing Series - Vol. 3. Edited
by Tadashi Kitamura (Kyushu Institute of Technology, Japan). 324pp Pub.
date: Feb 2001 ISBN 981-02-4518-1. World Scientific. (See here)
|
 Back
to the Group of laboratories for Medical Electronics and Intelligent Systems
Back
to the Group of laboratories for Medical Electronics and Intelligent Systems
Copyright Horia-Nicolai Teodorescu, 1999-2001
For any questions, please write to Prof. Horia-Nicolai
Teodorescu
Last modified on October 15, 2001
{kind=link}